0 简介
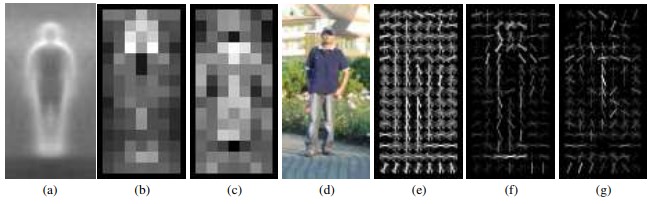
HOG特征即 Histogram of oriented gradients,源于2005年一篇CVPR论文,使用HOG+SVM做行人检测,由于效果良好而被广泛应用。大体效果如下,具体使用HOG+SVM做行人检测时再讨论详细代码。
算法计算步骤概览
- 图像预处理。
伽马矫正(减少光度影响)和灰度化(也可以在RGB图上做,只不过对三通道颜色值计算,取梯度值最大的)【可选步骤】 - 计算图像像素点梯度值,得到梯度图(尺寸和原图同等大小)
- 图像划分多个cell,统计cell内梯度直方向方图
- 将$2\times 2$个cell联合成一个block,对每个block做块内梯度归一化
1 图像预处理
1.1 gamma矫正和灰度化
作用:gamma矫正通常用于电视和监视器系统中重现摄像机拍摄的画面.在图像处理中也可用于调节图像的对比度,减少图像的光照不均和局部阴影.
原理: 通过非线性变换,让图像从暴光强度的线性响应变得更接近人眼感受的响应,即将漂白(相机曝光)或过暗(曝光不足)的图片,进行矫正
gamma矫正公式:
$$
f(x) =x^{\gamma}
$$
即输出是输入的幂函数,指数为$\gamma$
代码实现如下
1 | import cv2 |
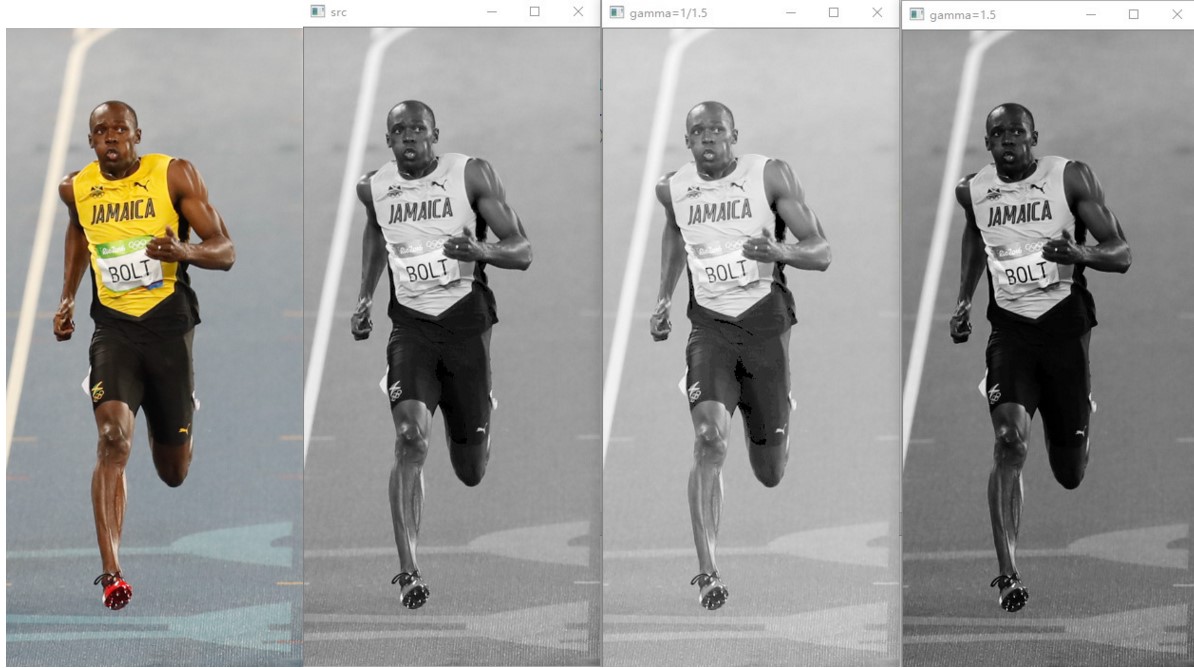
下图分别代表了处理之后的原图,灰度图,gamma=1/1.5矫正,gamma=1.5矫正
2 计算图像像素梯度图
我们需要同时计算图像的水平梯度图和垂直梯度图 。如下图,假设我们要计算下图中像素点A的梯度值,
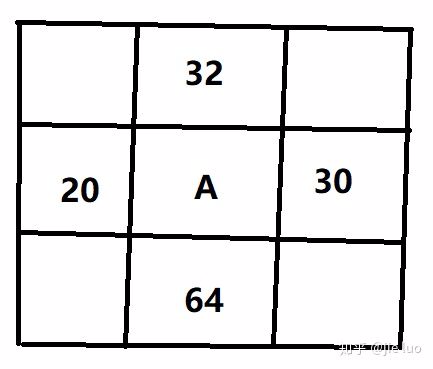
计算方法为
梯度大小
- 水平梯度: $g_x=\sqrt {(L(x-1,y)-L(x+1,y))^2}=\sqrt{(30-20)^2}=\sqrt{10^2}=10$
- 垂直梯度: $g_y=\sqrt {(L(,y+1)-L(x,y-1))^2}=\sqrt{(32-64)^2}=\sqrt{32^2}=32$
梯度方向
+
$$
\theta (x,y) = arctan [\frac{g_x}{g_y}] =arctan\frac{10}{32}
$$
梯度方向会取绝对值,因此得到的角度范围是 $[0,180°]$
上面这些计算过程,在opencv中有对应的算子,称为Sobel算子,分别计算水平和垂直方向梯度的。
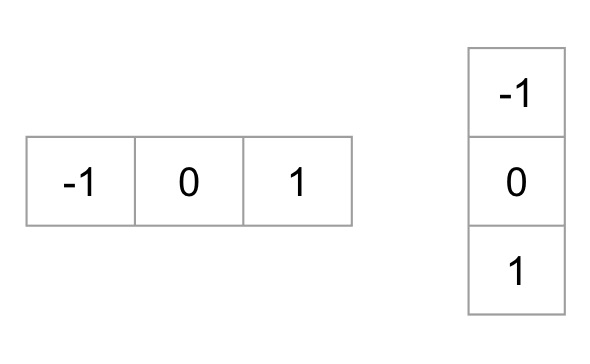
使用的python opencv代码为
1 | im = cv2.imread('bolt.png') |
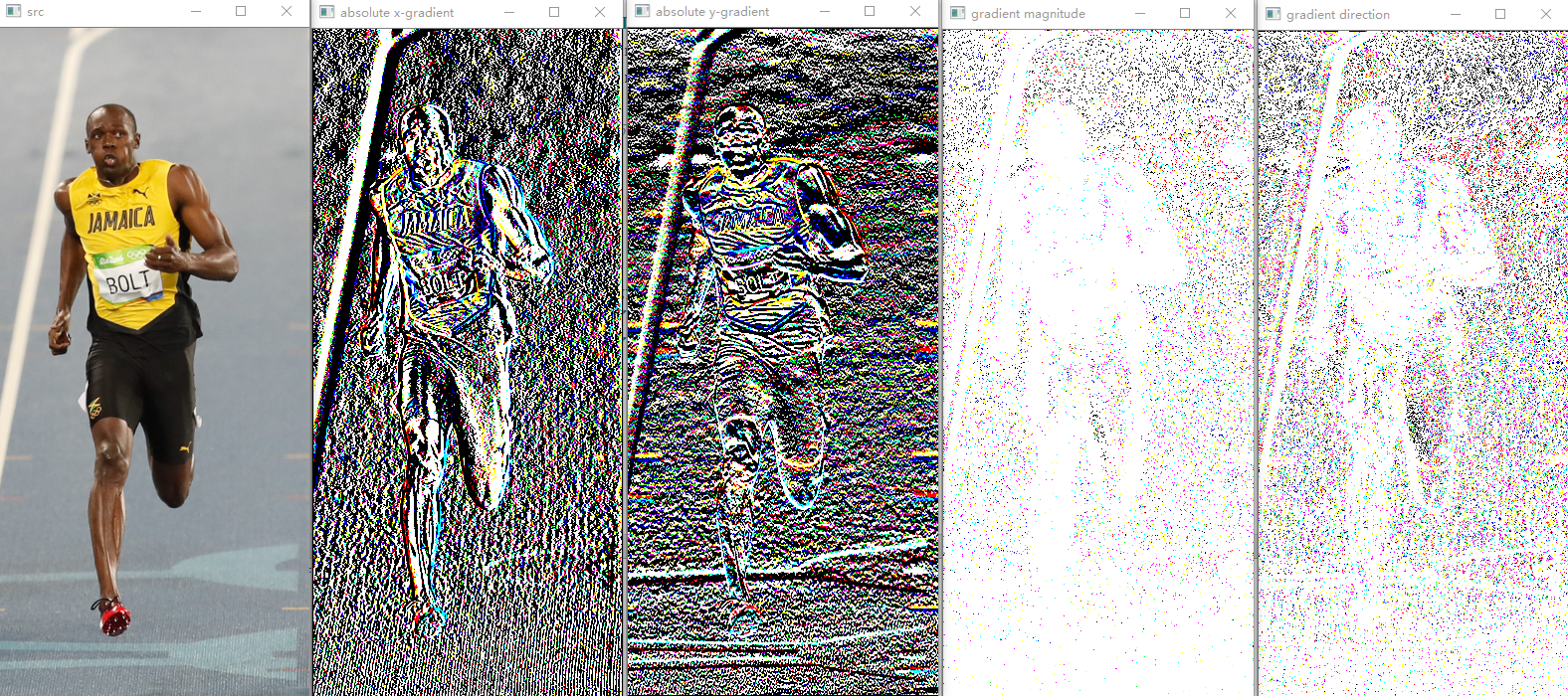
效果如下,分别为原图,x方向梯度绝对值,y方向梯度绝对值图,梯度幅度图,梯度方向图
下图是没有使用归一化效果
使用归一化之后的效果
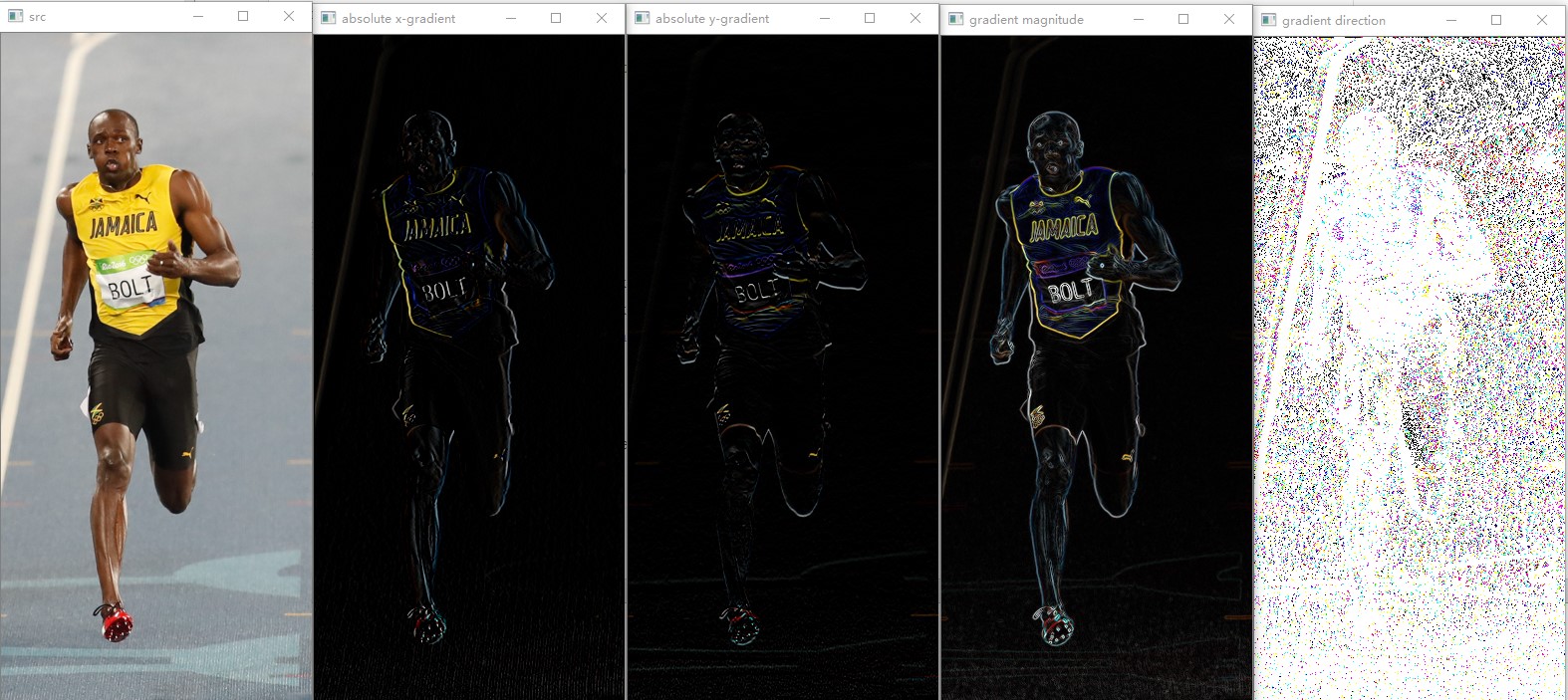
可以看到
- x方向梯度图会强化垂直方向的特征,可以观察到左侧白色斜线更加明显,但是底部一些水平线没有了。
- y方向梯度图会强化水平方向特征,底部水平线强化了,左侧垂直线不是那么明显了。
梯度图移除了大量非显著性特征,并加强了显著特征。三通道的彩色图中,每个像素的梯度幅度是三个通道中最大的那个,而梯度方向是梯度幅度最大的那个通道上的方向。
3 计算梯度直方图
经过上一步计算之后,每个像素点都会有两个值:梯度方向和梯度幅度。
但是,也看到了,梯度幅度和梯度方向图与原图等同大小,实际如果使用这些特征,会存在两个问题
- 计算量很大,基本就是原图
- 特征稀疏。图中其实只有少量稀疏的显著特征,大部分可能是0
以上是个人理解。
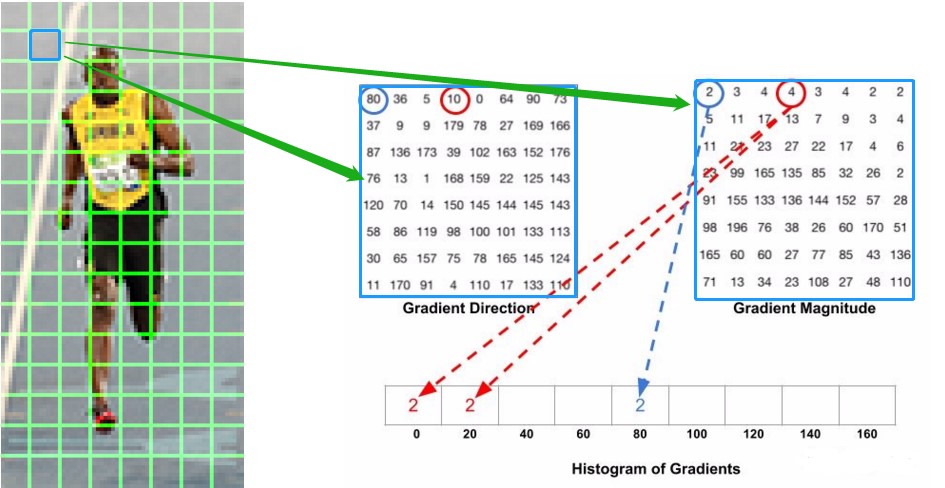
HOG特征在此步骤选择联合一个$8\times 8$的小格子内部一些像素,计算其梯度幅度和梯度方向的统计直方图,这样一来就可以以这个梯度直方图来代替原本庞大的矩阵。每个像素有一个梯度幅度和梯度方向两个取值,那么一个$8\times 8$的小格子一共有$8\times 8\times 2=128$个取值。
上面提到,梯度方向取值范围是$[0,180]$,以每20°为一个单元,所有的梯度方向可以划分为9组,这就是统计直方图的分组数目。如下图,我们选取划分格子之后的第二行第二列一个小单元,计算得到右边的梯度方向图和梯度幅度图,同时以以梯度方向为index,统计分组数量。
得到的统计频率直方图如下
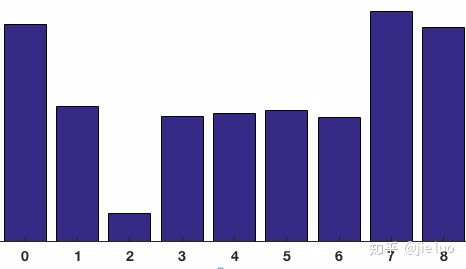
从上图可以看到,更多的点的梯度方向是倾向于0度和160度,也就是说这些点的梯度方向是向上或者向下,表明图像这个位置存在比较明显的横向边缘。因此HOG是对边角敏感的,由于这样的统计方法,也是对部分像素值变化不敏感的,所以能够适应不同的环境。
至于为什么选取$8\times 8$为一个单元格,是因为HOG特征当初设计时是用来做行人检测的。在行人图片中$8\times8$的矩阵被缩放成$64\times 128$的网格时,足以捕获一些特征,比如脸部或者头部特征等。
4 block归一化
目的:降低光照的影响
方法:向量的每一个值除以向量的模长
比如对于一个$(128,64,32)$的三维向量来说,模长是$ \sqrt{128^2+64^2+32^2}=146.64$,那么归一化后的向量变成了$(0.87,0.43,0.22)$。
HOG在选取$8\times 8$为一个单元格的基础之上,再以$2\times 2$个单元格为一组,称为block。作者提出要对block进行归一化,由于每个单元格cell有9个向量,$2\times 2$个单元格则有36个向量,需要对这36个向量进行归一化。下图演示了如何在图像中抽取block
5 HOG特征描述
每一个$16\times 16$大小的block将会得到36大小的vector。那么对于一个$64\times128$大小的图像,按照上图的方式提取block,将会有7个水平位置和15个竖直位可以取得,所以一共有$7\times15=105$个block,所以我们整合所有block的vector,形成一个大的一维vector的大小将会是$36\times105=3780$。
6 参考代码
计算图像HOG特征时,我们使用如下代码
1 | import matplotlib.pyplot as plt |
效果如下
