1 YOLOv1
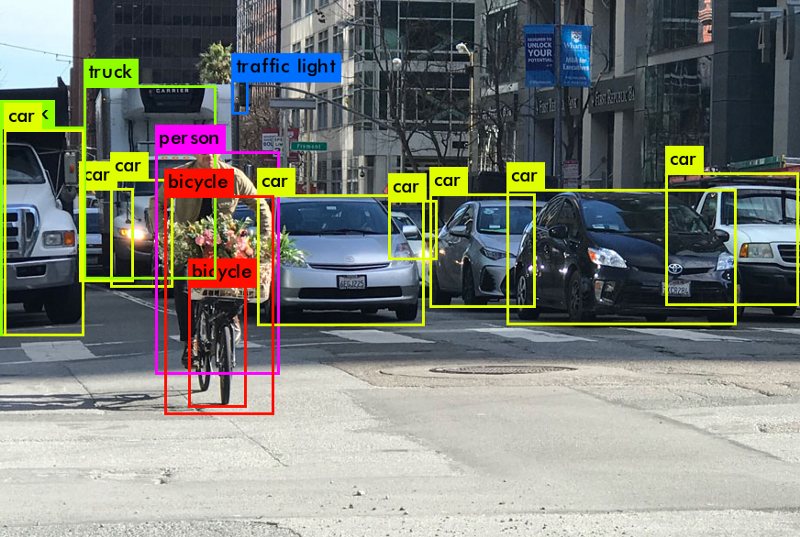
我们先看yolov1的检测效果
1.1 Grid Cell
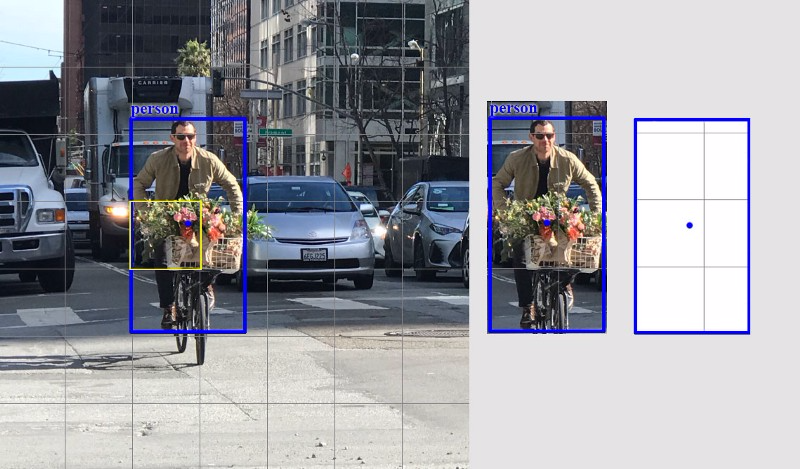
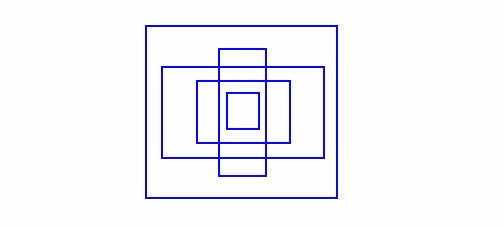
YOLOv1把输入图片切分成$s\times s$个grid cell,每个grid cell只预测一个物体。比如下图中,黄色grid cell会预测中心坐标点落入其中的这个person物体。
注意这里的grid cell只是在图像上看起来是一个方格,实际是原图在经过yolo网络之后会变成$s\times s$个feature map,下图中的一个grid cell经过网络变换之后到最后的特征层变成了一个坐标点。比如原图为$448\times 448$经过yolo最后抽取得到的feature map为$7\times 7\times 30$
每个grid cell只预测固定数目的bbox,当前示例中黄色grid cell做了两个bbox(2个蓝色框)预测来定位person这个物体的位置
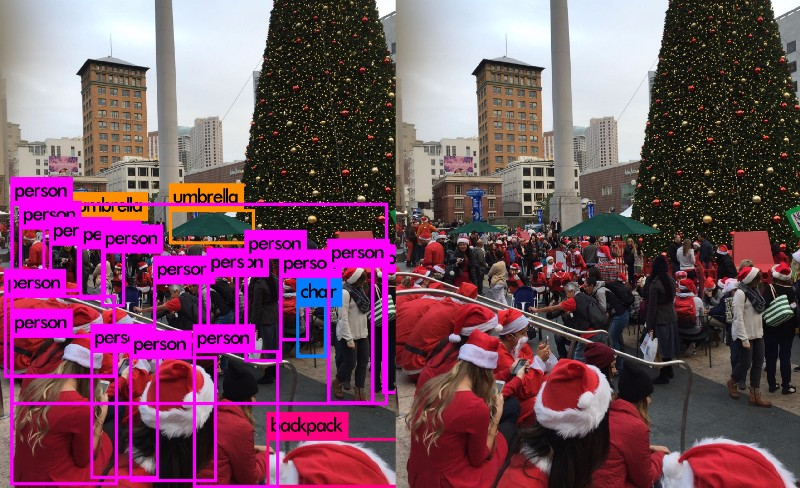
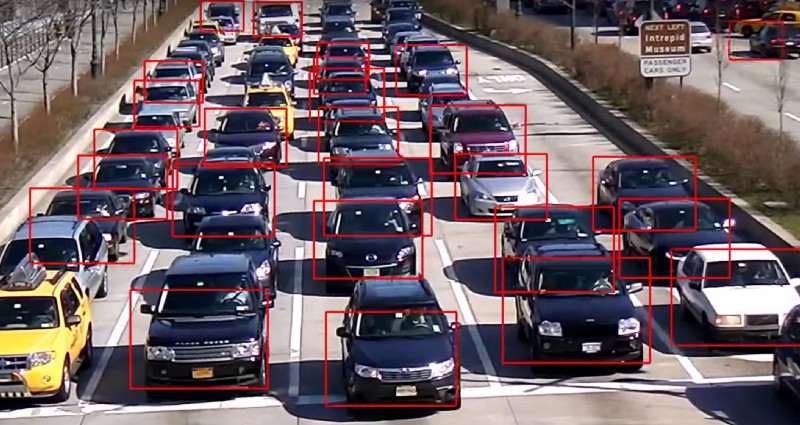
然而,一个grid cell只预测一个物体的规则限制了YOLO的预测能力。如果几个物体密集紧邻(多个物体的中心坐标可能会落在一个grid cell里面),yolo就会遗漏一些物体。如下图,左下方有9个圣诞老人,但是yolo只能检测出来5个。
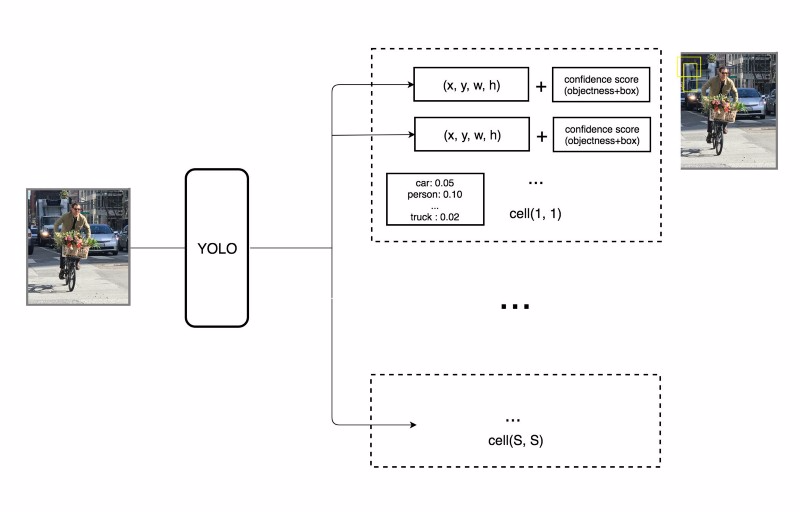
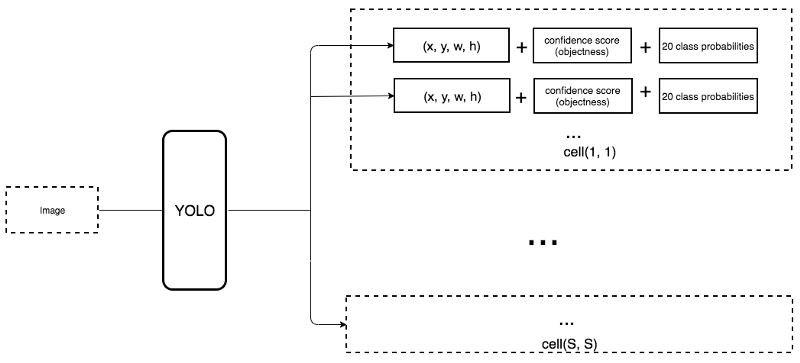
对于每个grid cell
- 预测B个bbox,并且每个bbox有一个box置信度。
- 即便上面预测了B个box,但实际只会检测一个物体(只保留一个)
- 预测C个条件分类概率(每个目标分类的概率)
比如,对VOC数据集,YOLO使用了$7\times 7$(S=7)的grids,每个grid cell预测2(B=2)个bbox,以及20个分类(C=20)。
每个bbox有个5元组$(x,y,w,h,conf)$,分别为bbox的坐标位置和置信度。这个置信度反映的是这个bbox包含目标(物体)的概率,以及此bbox的精确度。我们会对坐标位置进行归一化,变成0-1之间的比率(这一点,在准备yolo的训练数据时得到体现)。注意,其中的x,y是相对于当前cell的偏移量。每个grid cell有20个条件分类概率,此条件分类概率是检测到的物体属于20个分类里某一分类的概率(每个grid cell为会所有的分类都有一个概率,此处20个分类,会有20个概率)。因此,yolo最终的预测矩阵为
$$
(S,S,B\times 5+c) = (7,7,2\times 5+20)=(7,7,30)
$$
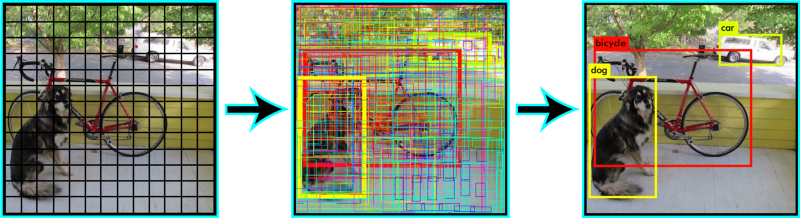
这样会产生非常多的bbox(下图中间),但是只保留置信度高于一定阈值(0.25)的bbox作为最终预测(下图右边)。
每个预测bbox的分类置信度计算公式如下
$$
分类置信度= box置信度 \times 条件分类概率
$$
它同时在分类和定位上衡量预测的bbox的置信度
上面的写法很容易混淆,一个详细的定义如下:
- $bbox置信度= P_r(object)\times IOU$
- $条件分类概率= P_r(class_i|object)$
- $分类置信度= P_r(class_i)\times IOU=bbox置信度\times 条件分类概率$
其中
- $P_r(object)$是bbox包含物体的概率
- $IOU$是预测bbox和真实bbox之间的IOU
- $P_r(class_i|object)$为给定当前物体,预测其属于分类$class_i$的概率
- $P_r(class_i)$是物体属于分类$class_i$的概率
1.2 网络架构设计
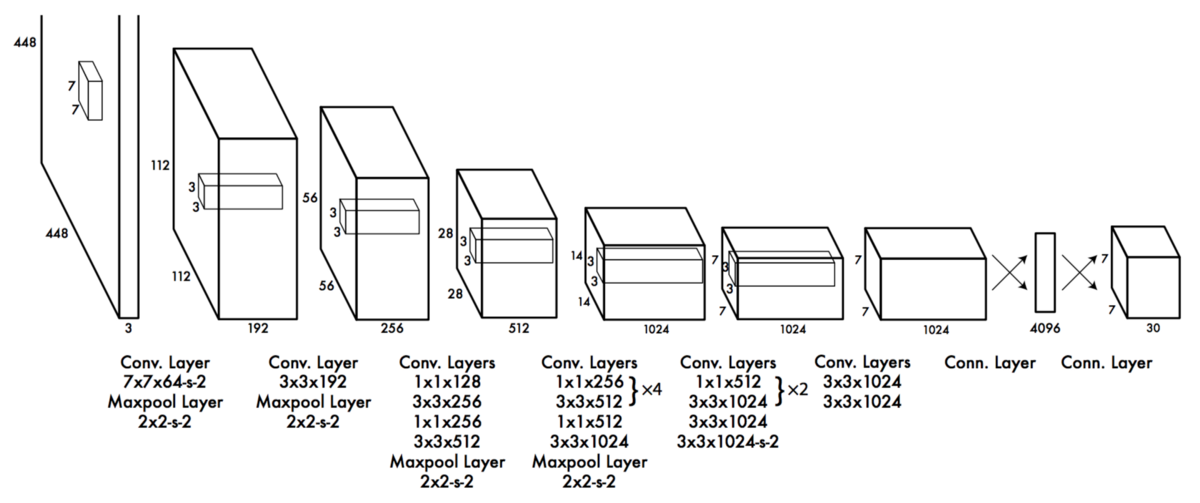
网络使用了24组卷积网络+2个全连接层。一些卷积层使用$1\times 1$以减小特征图深度。最后一个卷积层输出$7\times 7\times 1024$,再接2个全连接层实现一种线性回归,最终输出$(7,7,30)$。
1.3 损失函数
YOLO的每个grid cell预测多(VOC中是2个)个bbox。为了计算正阳性样本的损失,我们只要求它们之中的一个bbox对物体负责。因此,我们选取与真实标注(ground truth)有最高IOU的一个。这种策略导致bbox的的预测的特殊性,即每个预测在物体尺寸和比率上更准。
YOLO使用预测bbox和真实bbox的二次方差和来作为损失函数。损失函数由以下项组成
- 分类损失
- 定位损失:预测bbox和真实bbox之间的误差
- 置信度损失:box包含物体的置信度
1.3.1 分类损失
如果检测到物体,每个grid cell的分类损失是每个分类的条件概率的平方误差和。
$$
\sum _{i=0} ^{S^2}1 _i ^{obj} \sum _{c \in classes}(p_i(c)-\hat p_i(c))^2 \
其中如果在grid \quad cell\quad i中出现物体,则1 _i ^{obj}=1,否则1 _i ^{obj}=0 \
\hat p_i(c) 代表grid\quad cell\quad i中分类c的条件分类概率
$$
所以这个误差项可以这么理解:
- 首先,当前这个grid cell–>一共有 $7\times 7$个,中有物体的概率。此项有$49\times 2(每个grid \quad cell预测2个)=98$个
- 其次,这个物体分别属于20个分类的概率
1.3.2 回归损失
回归损失衡量的是,预测bbox的位置和尺寸的误差。YOLOv1只计算负责检测物体那个bbox的误差
$$
\lambda _{coord}\sum _{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj}[(x_i-\hat x_i)^2+(y_i-\hat y_i)^2] \
- \lambda {coord}\sum {i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj} [(\sqrt{w_i}-\sqrt{\hat w_i})^2+((\sqrt{h_i}-\sqrt{\hat {h_i}}))^2] \
其中 如果第i个grid \quad cell中的第j个bbox是负责检测物体的,则1{ij} ^{obj}=1,否则1{ij} ^{obj}=0. \
\lambda _{coord}增加bbox坐标的损失权重,默认为5
$$
在YOLO看来大的bbox和小的bbox的2个像素的误差是相等的,为刻意强调这一点,YOLO没有直接预测bbox的宽和高,而是宽的二次方根和高的二次方根。除此之外,对此loss乘以一个权重$\lambda _{coord}$以增加bbox的准确率。
1.3.3 置信度损失
如果某个物体在box中被检测到,其置信度损失(衡量的是box中的物体)为
$$
\sum {i=0} ^{S^2}\sum{j=0} ^B1_{ij} ^{obj}(C_i-\hat C_I)^2 \
其中
- \hat C_i是grid\quad cell\quad i中第j个box的置信度
- 1_{ij} ^{obj}=1 如果第i个grid\quad cell的第j个box负责检测物体,否则为0
$$
如果某个物体不在box中,其置信度损失为
$$
\lambda {noobj}\sum{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{noobj}(C_i-\hat C_i)^2 \
其中
- 1_{ij} ^{noobj}是对1_{ij} ^{noobj}的一种补充
- \hat C_i是第i个grid \quad cell的第j个box的置信度
- \lambda _{noobj}降低背景检测损失的权重(noobj即背景)
$$
由于大部分box不包含任何物体,这会导致分类(正负样本)的不均衡,因此,我们降低了背景检测损失的权重,即$\lambda _{noobj}$默认值为0.5
1.3.4 最终损失
最终损失为前面三种损失之和
$$
\begin{equation}
\begin{aligned}
& Loss= \sum _{i=0} ^{S^2}1 _i ^{obj} \sum _{c \in classes}(p_i(c)-\hat p_i(c))^2 +\
& \lambda _{coord}\sum _{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj}[(x_i-\hat x_i)^2+(y_i-\hat y_i)^2] +\
& \lambda _{coord}\sum {i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj} [(\sqrt{w_i}-\sqrt{\hat w_i})^2+((\sqrt{h_i}-\sqrt{\hat {h_i}}))^2] +\
&\sum {i=0} ^{S^2}\sum{j=0} ^B1{ij} ^{obj}(C_i-\hat C_I)^2+ \
&\lambda {noobj}\sum{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{noobj}(C_i-\hat C_i)^2
\end{aligned}
\end{equation}
$$
1.4 yolo评价
- 优点
- 快速,实时检测
- 使用单一结构网络,可以端到端地训练
- 通用。用自然图片训练得到的网络也可用于艺术图片的检测
- 区域候选的方法限制了分类器识别特定区域。YOLO在预测边框时可以遍历整个图像。使用相关信息时,YOLO在背景区域检测更少的假阳性。
- YOLO每个grid cell只检测一个物体,这使得它在做预测时增加了空间多样性。
2 YOLOv2
与基于区域候选的方法相比,YOLO有更高的定位损失以及更低的召回率。
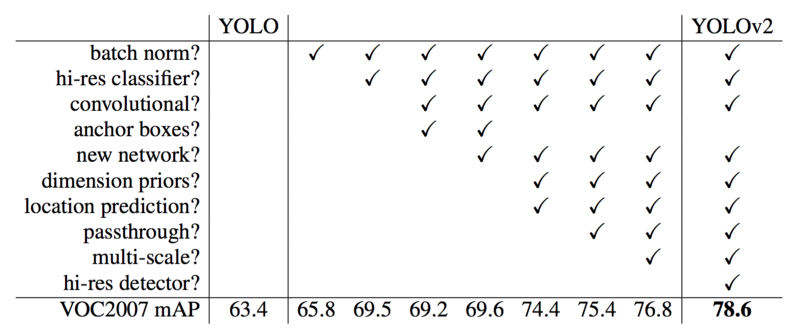
2.1 准确率提升
2.1.1 BatchNorm
每个卷积层之后添加一层BN,可以去掉dropout,同时提升2%的map
2.1.2 高分辨率
我们先看看yolov1的训练步骤
- 首先,训练一个类似VGG的分类网络【用的是$224\times 224$图片】
- 然后,使用全连接层替换卷积层
- 再端到端地训练目标检测【用的是$448\times 448$图片】
YOLOv2的训练步骤
- 训练一个分类器:先用$224\times 224$的图片训练,再用$448\times 448$图片接着训练(更少的epoch)
后续步骤一致。这使得yolov2的检测器更容易 训练,map也提升了4%。
2.1.3 anchor box
从yolo的论文中,我们得知,训练阶段的早期会出现不稳定的梯度,因为yolo会随意预测物体尺度和位置。而实际中,一些物体的尺寸是有规律的。比如汽车的长宽比一般是0.41
由于我们只需要一个bbox猜测值是对的就可以,因而如果我们按照实际物体比率来初始化这些预测的初始值,训练阶段就会稳定得多。例如,我们可以按照如下步骤构建5个anchor box
YOLOv2不直接预测bbox,而是预测其相对于上面5个bbox的偏移量。如果限制偏移量的值,我们可以保持预测的多样性,并使得每个预测集中于特定尺度,这样一来初始训练阶段就会稳定许多。
以下是对yolov1网络的改动
- 移除了最后两个负责预测bbox的个全连接层
- 将分类预测从cell级转向bbox级。这样一来,每个预测包含了预测bbox的4个位置参数,一个box置信度(是否包含物体)以及20个分类概率。每个grid cell5个bbox,每个bbox25个参数,共125个参数。与yolov1一样,物体预测依旧是预测预测的bbox与真实bbox之间的IOU。
yolov1是如何做预测的
yolov2是如何做预测的.注意与yolov1区别
- 为了生成$7\times7\times125$的预测,将网络的最后两层替换$3\times3$的卷积层,每个卷积层输出1024个通道,然后再用$1\times1$卷积将$7\times7\times1024$转换成$7\times7\times125$。
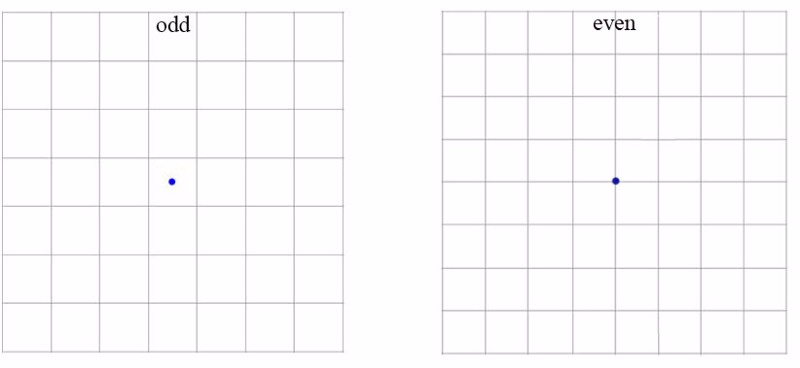
- 将网络输入图像尺寸从$448\times 448$改为$416\times 416$.由于网络中心一般是大物体坐标中心,之前的$8\times8$会出现不确定性预测。输入图像尺寸从$448\times448$改为$416\times416$之后,输出的特征空间尺度从$8\times8$变成$7\times7$。
使用anchor box使得map从69.5下降到69.2%,但是召回率从81%提升到88%。
2.2 维度聚类
在诸多问题领域,bbox其实有很强的可识别模式。比如,自动驾驶领域,2个最常见的模式是汽车和行人。YOLOv2使用kmeans聚类在训练集上得到模式最多的K个bbox。
由于需要处理的是bbox,而非点,其距离衡量指标使用的是IOU。
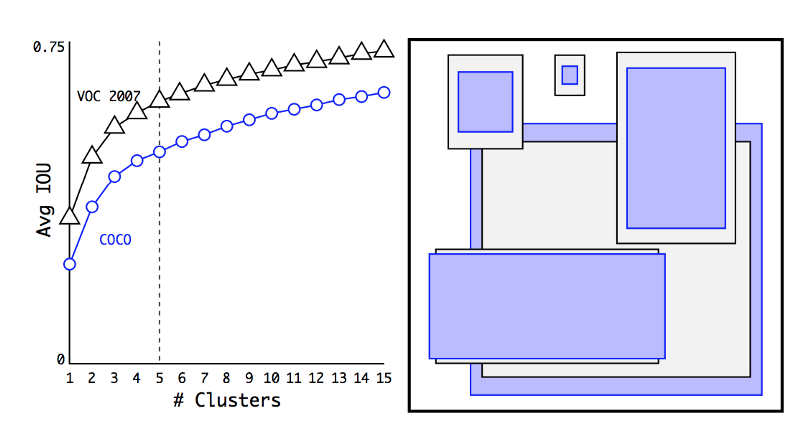
上图左边是在真实bbox中使用不同聚类中心数目得到的平均IOU,增加聚类中心数目,准确率提升。使用5个聚类中心得到比较均衡的结果,右边是5个聚类中心时的bbox分布。
2.3 直接的位置预测
预测的是位置相对于anchor左上角的偏移量。如果直接,无约束的预测会导致随机结果,YOLO预测的是5个参数$t_x,t_y,t_w,t_h$并使用sigma函数加以约束其取值范围。下图中蓝色框是预测的bbox,点线矩形框是anchor。左上角的$C_x,C_y$也是anchor的左上角位置,预测的是相对于此处的偏移。
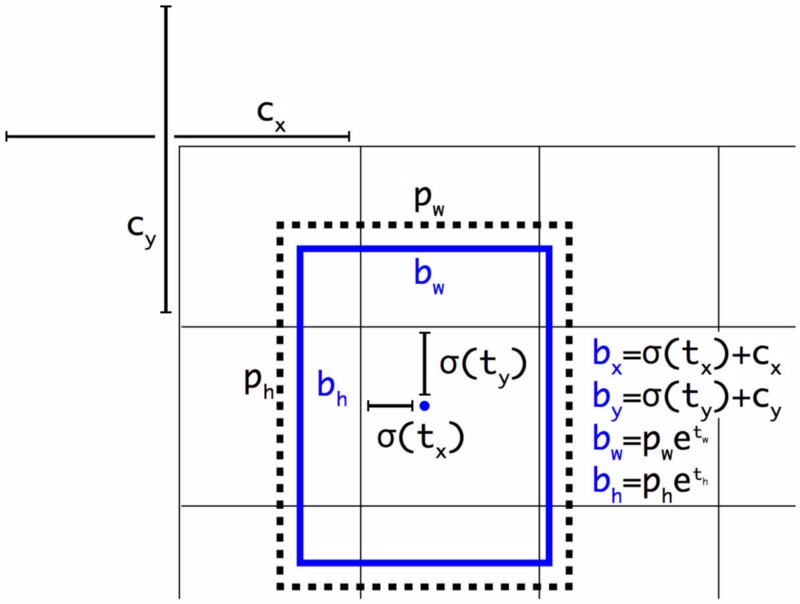
其中
$$
b_x=\sigma(t_x)+c_x \
b_y=\sigma(t_y)+c_y \
b_w=p_we^{t_w} \
b_h=p_he^{t_h} \
P_r(obj)*IOU(b,obj)=\sigma(t_0) \quad \sigma(t_0)是box的置信度\
其中\
t_x,t_y,t_w,t_h是直接由yolo预测得到的\
c_x,c_y是anchor的左上角坐标,p_w,p_h是anchor的宽度和高度\
c_x,c_y,p_w,p_h由宽度和高度归一化之后的结果\
b_x,b_y,b_w,b_h是最终的预测bbox
$$
所以,需要知道的是
- yolo网络只预测偏移量
- 偏移量与默认的anchor box进行运算之后得到bbox
- bbox与真实box不是同一个
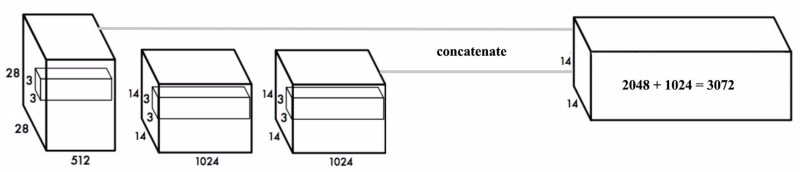
2.4 修正的特征
yolo使用了一种称为通道的技术,将$28\times 28\times 512$层reshape到$14\times 14\times 1024$,然后将这两层的feature拼接起来做预测。
参考
2.5 多尺度训练
移除全连接层的yolo可以接收不同尺度输入图像,如果输入图像宽和高双倍之后,我们需要预测4倍的grid cell。由于yolo是按照32倍下采样的,所以输入图像是32的倍数即可。每10个batch之后,yolo会随机选取其他尺度的图像来训练网络。
2.6 使用不同优化方案之后的准确率比较
2.7 速度提升
darknet
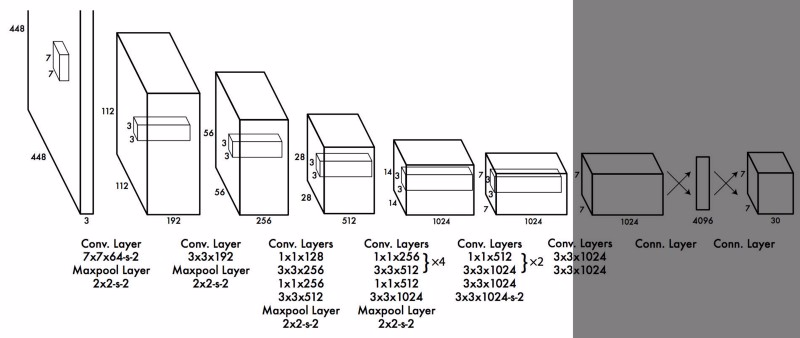
为了进一步简化CNN结构,设计了一个darknet网络。其在ImageNet上获取了72.9%的top-1准确率和91.2%的top-5准确率。darknet大部分使用的是$3\times 3$卷积
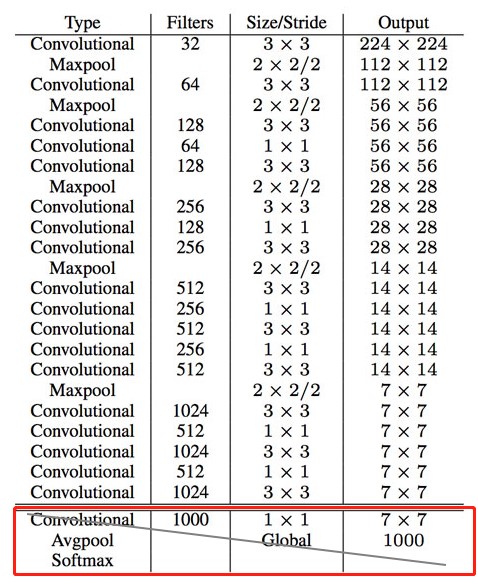
在做目标检测时,最后红色框的最后的卷积层使用$3\times 3$的卷积层替换,然后再使用$1\times 1$的卷积将$7\times 7\times 1024$的输出转换成$7\times 7\times 125$
3 yolov3
3.1 类预测
大多数分类器认为目标分类是互斥的,所以yolov2用的是softmax,全部分类的概率之和为1,但是yolov3使用了多标签分类。比如,标签可能既是行人也可能是小孩。yolov3为每个分类使用独立的logistic分类器以计算输入属于特定分类的概率。yolov3给每个分类用的是二分交叉熵,而非MSE。此举同时降低了计算复杂度。
3.2 bbox预测和损失函数
yolov3使用logistic回归来预测每个bbox的为物体的置信度。yolov3修改计算损失函数的方式,如果bbox与真实标签obj重叠区域大于其他所有的,其对应的obj(物体)置信度为1(即选取一个与ground truth有最多重叠的anchor,其对应的obj score为1)。其他与真实标签obj重叠区域超过阈值(默认为0.5)的anchor,它们不计算损失。每个ground truth obj只分配给一个bbox。如果某个bbox没有被分配ground truth,不计算其分类和定位损失,只计算物体置信度。只使用$t_x,t_y$而非$b_x,b_y$计算损失
$$
b_x=\sigma(t_x)+c_x \
b_y=\sigma(t_y)+c_y \
b_w = p_we^{t_w} \
b_h = p_he^{t_h}
$$
3.3 特征金字塔(FPN网络)
yolov3在每个位置上得到3个预测,每个预测由1个bbox,一个obj物体得分,80个分类得分组成。即$=N\times N\times [3\times (4+1+80)]$ 。
YOLOv3在三个不同尺度上预测
- 最后一个特征map层
- 从最后一层往回走2层,2倍上采样。yolov3采用了一个更高分辨率的特征图,并将它与上采样层得到的特征图进行逐元素相加。在这个特征融合层,yolov3再进行卷积得到第二个预测集。
- 重复步骤2,得到的特征层有好的高层结构(语义级)信息和物体位置的空间信息。
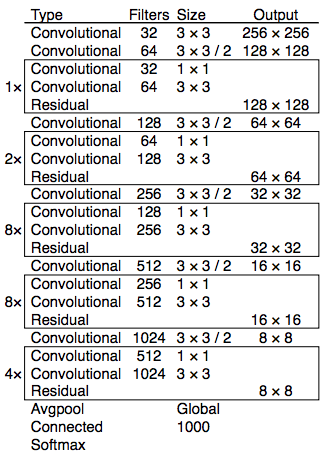
3.4 特征抽取器
使用一个新的darknet-53来替换前面的darknet-19,darknet主要由$3\times 3$和$1\times 1$卷积组成,以及一些类似ResNet的跳转连接。
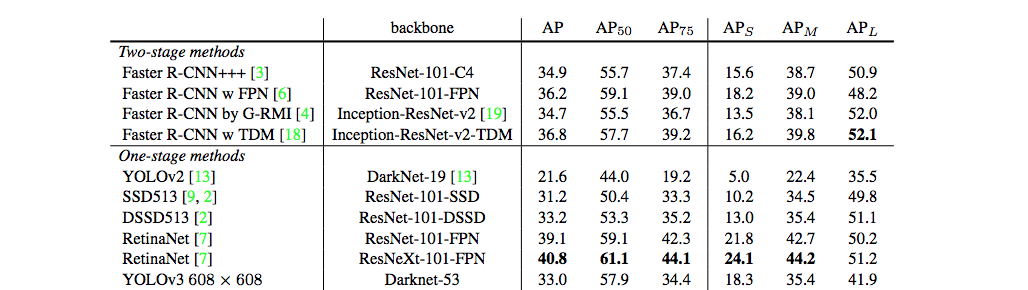
3.5 准确率
4 损失函数变化
4.1 YOLOv1损失函数
先回顾下YOLOv1的损失函数
$$
Loss= \sum _{i=0} ^{S^2}1 _i ^{obj} \sum _{c \in classes}(p_i(c)-\hat p_i(c))^2 +\
\lambda _{coord}\sum _{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj}[(x_i-\hat x_i)^2+(y_i-\hat y_i)^2] +\
\lambda _{coord}\sum {i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj} [(\sqrt{w_i}-\sqrt{\hat w_i})^2+((\sqrt{h_i}-\sqrt{\hat {h_i}}))^2] +\
\sum {i=0} ^{S^2}\sum{j=0} ^B1{ij} ^{obj}(C_i-\hat C_I)^2+ \
\lambda {noobj}\sum{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{noobj}(C_i-\hat C_i)^2
$$
4.2 YOLOv2
yolov2的损失函数只是在yolov1基础上改动了关于bbox的w和h的损失计算方式
即从
$$
\sum _{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj} [(\sqrt{w_i}-\sqrt{\hat w_i})^2+((\sqrt{h_i}-\sqrt{\hat {h_i}}))^2]
$$
改动到
$$
\sum _{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{obj} [(w_i-\hat {w_i})^2+(h_i-\hat {h_i})^2]
$$
去掉了w和h的二次根号,作者认为没有必要。
4.3 yolov3
YOLOv3的损失函数是在yolov2基础上改动的,最大的变动是分类损失换成了二分交叉熵,这是由于yolov3中剔除了softmax改用logistic。不过在不同的框架中具体的修改不一致。
darknet
darknet源码中只修改了分类损失的计算方法。也即从yolov2的分类损失部分
$$
\sum {i=0} ^{S^2}\sum{j=0} ^B1_{ij} ^{obj}(C_i-\hat C_I)^2+ \
\lambda {noobj}\sum{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{noobj}(C_i-\hat C_i)^2
$$
修改到
$$
\sum {i=0} ^{S^2}\sum{j=0} ^B1_{ij} ^{obj} (C_i log \hat C_i+(1-C_i)log (1-\hat C_i) )+\
\lambda {noobj}\sum{i=0} ^{S^2}\sum {j=0} ^B1{ij} ^{noobj}(C_i-\hat C_i)^2
$$
Tensorflow
Tensorflow版本的yolov3 对以下部分都做了交叉熵损失
- 坐标的x,y
1
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[..., 0:2], from_logits=True)
- 置信度损失
1 | confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) + (1 - object_mask) * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) * ignore_mask |
- 分类损失
1 | class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[..., 5:], from_logits=True) |
没有对非目标的损失函数
5 注意 bbox数目变化
yolov1
$$
(S,S,B\times 5+c) = (7,7,2\times 5+20)=(7,7,30)
$$yolov2
$$
7\times7\times (5(每个grid cell5个bbox)\times (4(位置)+1(box置信度)+20(20个分类概率)))
$$yolov3
$$
(N\times N +2(上采样)\times N\times N +4(上采样)\times (N\times N))\times [3\times (4+1+80(分类))]
$$
Real-time Object Detection with YOLO, YOLOv2 and now YOLOv3
从YOLOv1到YOLOv3,目标检测的进化之路
yolov3 损失函数